Desirofreak
Foriker
Guten Morgen,
Mein Hirn hat vor einiger Zeit mal wieder eine Idee ersponnen und nun brauche ich mal die Hilfe von den Elektronikexperten unter euch. Da ich nicht wirklich weiß, wie ich diese Schaltung nennen würde, kam ich mit der Suche nicht sehr weit.
Um es mal zusammenzufassen. Ich habe mir so die Idee in den Kopf gesetzt, mehrere Loks in Multitraktion über einen Decoder zu steuern. Das ganze soll unter folgenden Randbedingungen geschehen:
- Eine Lok erhält den Decoder und ist sozusagen die "Zentrale" dieser Traktion.
- weitere Loks verfügen nicht über eigene Decoder und sollen nur zusammen mit der Zentrallok fahren. ( ähnlich der amerikanischen Boosterloks )
- Verbindung soll ohne großen Aufwand trennbar sein.
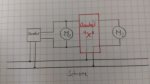
Ich habe mir das jetzt in etwa so vorgestellt: Vom Motorausgang des Decoders wird eine parallele Leitung durch eine Kupplung in die nächste Lok gelegt. Dort soll eine Schaltung die Motorspannung messen und dem Motor der zweiten Lok aus der Schiene genau die selbe Spannung bereitstellen. Die Einzelnen Motorkreisläufe sind dabei aber gar nicht elektrisch verbunden. Dadurch würde der Decoder effektiv nur einen Motor versorgen müssen, da der zweite ja direkt aus der Schiene ( natürlich gleichgericht ) versorgt wird.
Vorteil des Ganzen: man müsste damit beliebig viele Loks über den selben Decoder Steuern können.
Nachteil: es muss immer die Zentrallok dabei sein, was beim amerikanischen Boostersystem aber sowieso der Fall ist.
Ich hänge mal ein Bild an, um das Ganze zu verdeutlichen. Das rote Bauteil soll die gewünschte Schaltung markieren.
Über Anregungen würde ich mich freuen. Vielleicht gibt es so etwas schon dann wäre ein Link von Vorteil.
Danke schonmal
Gruss Gerrit aka Desirofreak
Mein Hirn hat vor einiger Zeit mal wieder eine Idee ersponnen und nun brauche ich mal die Hilfe von den Elektronikexperten unter euch. Da ich nicht wirklich weiß, wie ich diese Schaltung nennen würde, kam ich mit der Suche nicht sehr weit.
Um es mal zusammenzufassen. Ich habe mir so die Idee in den Kopf gesetzt, mehrere Loks in Multitraktion über einen Decoder zu steuern. Das ganze soll unter folgenden Randbedingungen geschehen:
- Eine Lok erhält den Decoder und ist sozusagen die "Zentrale" dieser Traktion.
- weitere Loks verfügen nicht über eigene Decoder und sollen nur zusammen mit der Zentrallok fahren. ( ähnlich der amerikanischen Boosterloks )
- Verbindung soll ohne großen Aufwand trennbar sein.
Ich habe mir das jetzt in etwa so vorgestellt: Vom Motorausgang des Decoders wird eine parallele Leitung durch eine Kupplung in die nächste Lok gelegt. Dort soll eine Schaltung die Motorspannung messen und dem Motor der zweiten Lok aus der Schiene genau die selbe Spannung bereitstellen. Die Einzelnen Motorkreisläufe sind dabei aber gar nicht elektrisch verbunden. Dadurch würde der Decoder effektiv nur einen Motor versorgen müssen, da der zweite ja direkt aus der Schiene ( natürlich gleichgericht ) versorgt wird.
Vorteil des Ganzen: man müsste damit beliebig viele Loks über den selben Decoder Steuern können.
Nachteil: es muss immer die Zentrallok dabei sein, was beim amerikanischen Boostersystem aber sowieso der Fall ist.
Ich hänge mal ein Bild an, um das Ganze zu verdeutlichen. Das rote Bauteil soll die gewünschte Schaltung markieren.
Über Anregungen würde ich mich freuen. Vielleicht gibt es so etwas schon dann wäre ein Link von Vorteil.
Danke schonmal
Gruss Gerrit aka Desirofreak